研究所动态
喜报 | 我所一篇论文被国际顶级会议IEEE ICDE录用
发布时间:2023年02月16日
近日,由我所师生与阿里巴巴合作完成的论文M2G4RTP: A Multi-Level and Multi-Task Graph Model for Instant-Logistics Route and Time Joint Prediction被国际顶级会议39th IEEE International Conference on Data Engineering (ICDE 2023)录用。该论文由我所蔡天岳同学在万怀宇老师、郭晟楠老师、林友芳老师的指导下,与温浩珉同学及阿里巴巴吴凡、吴黎霞、胡浩源合作共同完成。
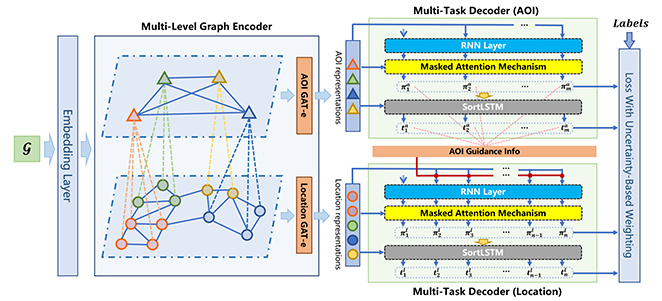
即时物流领域(如外卖配送、快递揽收)对于路线和时间预测(Route and Time Prediction, RTP)的需求愈发强烈,该预测旨在预测快递员对于待访问地点的未来路线和到达时间。准确的RTP可以极大地帮助平台,如优化订单调度或改善用户体验。尽管近年来已开展了各种解决RTP问题的工作,但现有工作仍存在以下三个局限性:i)未能考虑快递员在AOI(兴趣面,如小区、办公楼)之间的高级转移模式。ii)未能实现对路线和时间的联合预测。iii)现有大量基于树或基于序列的架构欠缺建模不同位置之间空间关系的能力。为了解决上述限制,我们提出了一个多层级多任务图模型,名为M2G4RTP,用于即时物流领域路线和时间的联合预测。具体地,我们提出了一种配备了名为GAT-e的编码模块的多层级图编码器,以捕获快递员在AOI之间的高级转移模式和在具体位置之间的低级转移模式。此外,还提出了一个多任务解码器,以完成对不同层级上路线和时间的联合预测。最后,我们设计了一种基于同方差不确定性的损失加权方法,以自适应地平衡两个任务。我们在工业规模的真实数据集上进行的大量实验,并在菜鸟网络上完成了在线部署,最终证实了我们提出的模型的优越性。