研究所动态
喜报 | 我所一篇论文被人工智能领域顶会KDD 2023录用
发布时间:2023年5月24日
由我所师生合作完成的论文DRL4Route: A Deep Reinforcement Learning Framework for Pick-up and Delivery Route Prediction被CCF A类会议、人工智能领域顶会KDD 2023录用,该论文由我所博士生毛潇苇、温浩珉和万怀宇老师、林友芳老师以及阿里郑建滨、强玉庭、吴黎霞、胡浩源合作完成。
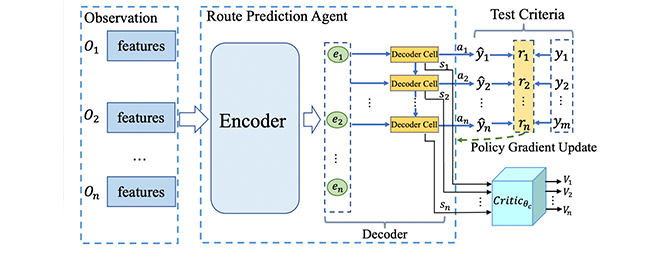
揽收和配送路线预测旨在给定工作者未完成任务的情况下预测其未来的路线。基于有监督学习的深度神经网络模型已经在该任务上取得了一定的成效,但是,这些方法不能将不可微分的测试目标引入到训练过程中,导致训练和测试目标不一致,这会降低模型在实际应用时的性能。为解决该问题,本工作首次将强化学习应用到路线预测任务中,提出一个基于深度强化学习的路线预测框架DRL4Route。该框架将深度神经网络学习历史行为模式的能力和强化学习优化不可微分目标函数的能力结合起来,作为一个即插即用的组件提升现有深度学习模型的性能。此外,我们提出一个基于演员-评论家算法的路线预测模型,利用泛化优势估计方法平衡估计策略梯度时产生的偏差和方差。最后,通过大量的离线和在线实验证明了提出方法的有效性。