研究所动态
喜报 | 我所一篇论文被国际顶级学术期刊IEEE TKDE录用
发布时间:2024年01月01日
由我所和丹麦奥尔堡大学师生合作完成的论文Pre-training General Trajectory Embeddings with Maximum Multi-view Entropy Coding被CCF A类期刊、数据挖掘顶刊IEEE TKDE录用,该论文由我所博士生林彦和万怀宇老师、郭晟楠老师、林友芳老师以及奥尔堡大学胡吉林老师和Christian S. Jensen老师合作完成。
时空轨迹(Spatial-temporal trajectory)提供了有关移动和出行行为的宝贵信息,进而驱动现实世界中的各类智能交通应用。时空轨迹在下游任务中的有效应用离不开轨迹的表示学习,即将轨迹映射为固定长度的嵌入向量。基于预训练的轨迹表示学习通过特殊构建的前置任务来学习通用嵌入,借助高可用性的无标签轨迹数据进行训练,能够提升下游任务的性能。然而,现有的预训练方法面临以下问题:(i)前置任务引入对特定下游任务的偏向,难以学习到通用嵌入;(ii)捕捉旅行语义和时空相关性方面的局限性;(iii)不规则采样、长序列轨迹的复杂性。
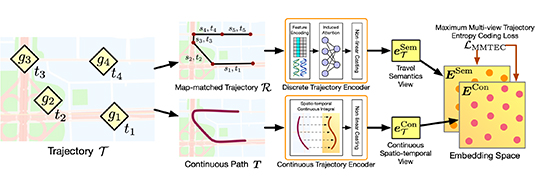
为了解决上述挑战,我们提出了轨迹多视图最大熵嵌入模型(Maximum Multi-view Trajectory Entropy Coding, MMTEC)来学习通用和全面的轨迹嵌入。具体而言,MMTEC为了高效地建模轨迹的旅行语义视图,提出了基于归纳式注意力的离散轨迹编码器,将轨迹在路网上所体现的旅行语义信息压缩为嵌入向量;为了有效地建模轨迹的连续时空视图,提出了基于NeuralCDE的连续轨迹编码器,能够恢复轨迹对应的连续时空变化并映射为嵌入向量。MMTEC将代表两方面视图的嵌入向量融合到轨迹的多视图最大熵编码框架中,从而构建能建模轨迹多视图信息的轨迹嵌入方法。MMTEC在两个轨迹数据集上进行验证,并被适配于轨迹预测、相似轨迹搜索、轨迹旅行时间估计三种下游任务。与基线模型的对比证明MMTEC所学习到的轨迹嵌入向量能够在三种下游任务上均取得最佳的性能,证明了MMTEC自监督学习的有效性与全面性。