研究所动态
喜报 | 我所6篇论文被人工智能顶级会议AAAI 2025录用
发布时间:2024年12月28日
近日,人工智能国际会议AAAI 2025公布录用结果,由我所师生共同完成的6篇论文被大会录用。 AAAI是CCF推荐的A类国际学术会议。本次AAAI 2025一共有12957篇投稿,录用率约为23.4%。此次我所被录用的论文涉及的研究方向包括车辆再识别、多智能体协作、时空预测、时序知识图谱、起终点行程时间量化、外卖推荐系统。论文的相关信息如下:
论文一
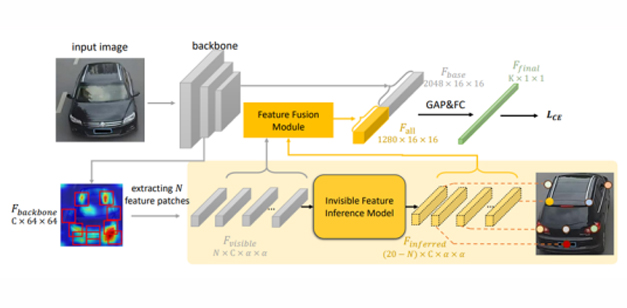
Infer the Whole from a Glimpse of a Part: Keypoint-based Knowledge Graph for Vehicle Re-identification
Kai Lv,Yunlong Li,Zhuo Chen,Shuo Wang,Sheng han,Youfang Lin
车辆再识别(Vehicle Re-ID)旨在识别和匹配不同摄像头视角下同一车辆的图像。目前许多方法都是基于单张图片提取特征,但在对比不同角度的车辆时,这些方法往往缺乏视角不变性。这导致一些因视角变化而部分遮挡的、具有辨别性的局部区域,在匹配过程中无法有效发挥作用。为了解决这一难题,论文提出了一种基于关键点(keypoint)的车辆再识别框架。论文引入知识图谱(knowledge graph),明确构建了车辆各部分之间的内在结构联系,并在关键点间建立联系,利用这些先验知识,即使在某些部位因角度差异而难以直接比较时,论文提出的方法也能实现有效匹配。经过大量实验验证,论文提出的方法在跨视角匹配的标准测试中,性能优于现有模型。同时,也是首个通过关键点知识图谱引入结构性先验,实现视角不变的车辆再识别研究。
论文二
CoDe: Communication Delay-Tolerant Multi-Agent Collaboration via DualAlignment of Intent and Timeliness
Shoucheng Song, Youfang Lin, Sheng han, Chang Yao, Hao Wu, Shuo Wang, Kai Lv
在多智能体协作任务中,通信扮演着重要的角色。但传统研究往往假设通信是即时的,这在现实情况往往难以满足。在现实世界里,智能体之间的通信常常伴随着延迟,即消息在不同时间被接收,这种现象称为异步通信(Asynchronous Communication),从而可能导致认知偏差和无效协作。论文首先在多智能体强化学习领域明确了两种通信延迟的设定,并指出了它们对协作任务的负面影响。为了解决这些延迟问题,论文提出了一个创新的框架——CoDe,即能够容忍通信延迟的多智能体合作框架。CoDe通过预测未来行为来学习表示智能体的意图,并将其作为信息传递,这样可以反映出智能体在未来行为上的稳定特征。并且基于意图表征,CoDe设计了意图和时效性的双重对齐机制,以加强异步信息的整合过程。这样,即使从延迟的消息中,智能体也能提取出其他智能体的长期意图,并选择性地利用与自己意图最相关的最新信息。实验结果显示,CoDe在无延迟的三个多智能体强化学习标准测试中均优于现有算法,并且在面对固定和变化的延迟条件时展现出了强大的鲁棒性

论文三
STD-PLM: Understanding Both Spatial and Temporal Properties of Spatial-Temporal Data with PLM
Yiheng Huang, Xiaowei Mao, Shengnan Guo, Yubin Chen, Junfeng Shen, Tiankuo Li, Youfang Lin, Huaiyu Wan
时空预测和插补对于智能交通系统的发展非常重要。然而大多数现有方法都是针对单个预测或插补任务设计的,无法同时适用于两者,这增加了模型训练部署的成本。此外,现有时空模型的零样本和少样本学习学习能力较差。虽然预训练语言模型 (PLM) 在各种任务(包括少样本和零样本学习)上表现出强大的模式识别和推理能力,但由于对时间相关性、空间连通性、非点对和高阶时空相关性等复杂的时空关系建模不足的限制,它们无法直接应用于时空任务上。在本文中,我们提出了 STD-PLM,使PLM能够理解时空数据的空间和时间属性并同时实现时空预测和插补任务。STD-PLM 通过精心设计的时空Tokenizer来理解时空相关性。并引入拓扑感知节点嵌入,让 PLM 以归纳方式理解和利用数据的拓扑结构。此外,为了缓解 PLM 引入的效率问题,我们设计了一个沙漏注意模块 (SGA),结合特定的约束损失函数,在确保性能的同时显著提高了模型的效率。实验表明,STD-PLM 在各种数据集的预测、插补任务、少样本以及零样本任务中表现出了卓越的性能和泛化能力。

论文四
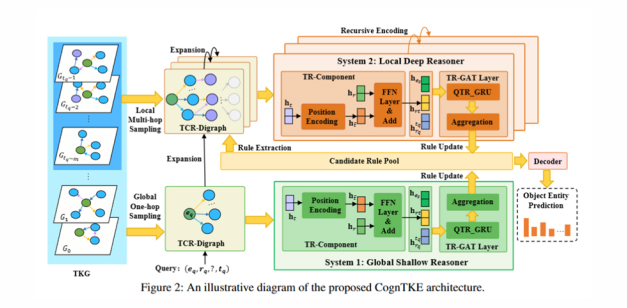
CognTKE: A Cognitive Temporal Knowledge Extrapolation Framework
Wei Chen,Yuting Wu,Shuhan Wu,Zhiyu Zhang,Mengqi Liao,Youfang Lin,Huaiyu Wan
时序知识图谱(Temporal Knowledge Graphs, TKGs)外推主要是依据历史发生事件来预测未来可能发生的事件,对各个领域都具有重要的学术和实用价值。现有的可解释推理研究主要集中在建模与查询相关的可理解时间路径。然而,这些基于路径的方法主要关注最近出现的局部时间路径,未能捕获TKG中复杂的时间路径,导致丢失了与查询相关的较长历史关系。在认知科学双过程理论的启发下,本文提出了一个认知时序知识外推框架(Cognitive Temporal Knowledge Extrapolation,CognTKE),该框架引入了一个新的时序认知关系有向图(TCR-Digraph),并在TCR-Digraph上进行可解释的全局浅层推理和局部深度推理。具体来说,TCR-Digraph由检索与查询相关的重要局部和全局历史时序关系路径组成。此外,CognTKE设计了全局浅层推理机和局部深层推理机,分别对TCR-Digraph进行全局单跳时序关系推理(系统1)和局部复杂多跳路径推理(系统2)。在四个基准数据集上的实验结果表明,CognTKE相比于最先进的基准在准确率上取得了显著的提升,并提供了出色的零样本推理能力和具有较强的可解释性。
论文五
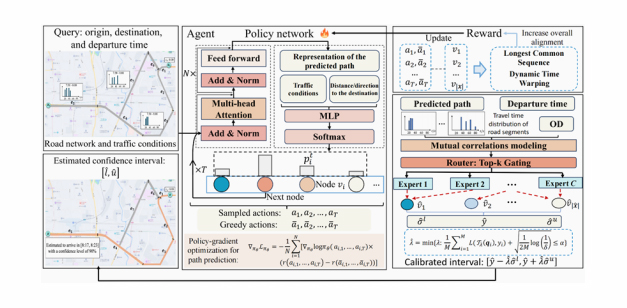
DutyTTE: Deciphering Uncertainty in Origin-Destination Travel Time Estimation
Xiaowei Mao, Yan Lin, Shengnan Guo, Yubin Chen, Xingyu Xian, Haomin Wen, Qisen Xu, Youfang Lin, Huaiyu Wan
量化起终点行程时间不确定性的目标是基于起点、终点和出发时间估计行程时间的置信区间。准确量化这种不确定性需要生成最可能的路径,并评估路径上每个路段的通行时间不确定性。这主要涉及两个挑战:1)预测与真实路径一致的路径;2)在变化交通状况下建模每个路段的通行时间对总行程时间不确定性的影响。为了解决这些挑战,我们提出了DutyTTE方法。针对第一个挑战,我们引入了一种深度强化学习方法,以提高预测路径与真实路径的一致性,缓解路径预测中的误差累积,从而更准确地获取经过路段的行程时间信息,以提升行程时间估计的准确性。针对第二个挑战,我们提出了一种由混合专家网络引导的不确定性量化机制,以更好地捕获每个路段在不同行程和交通状况下的通行时间不确定性。此外,我们基于Hoeffding置信上界对结果进行校准,从统计意义上保证估计的置信区间符合预期。在多个数据集上的大量实验表明,本文提出的方法优于基准方法,准确地量化了起终点行程时间的不确定性。
论文代码链接: https://github.com/maoxiaowei97/DutyTTE
论文六
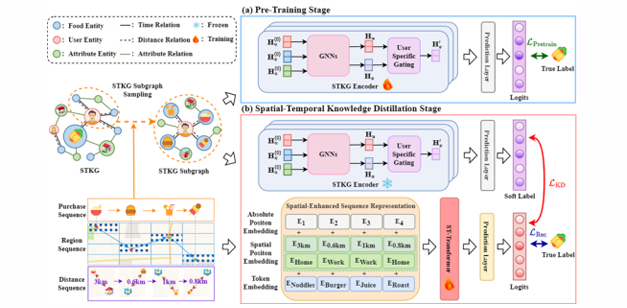
STKDRec: Spatial-Temporal Knowledge Distillation for Takeaway Recommendation
Shuyuan Zhao, Wei Chen, Boyan Shi, Liyong Zhou, Shuohao Lin, Huaiyu Wan
外卖推荐系统旨在根据用户的历史购买序列来为用户推荐未来可能购买的外卖选项,从而提升用户的满意度并促进商家的销售。现有方法主要聚焦于整合辅助信息(如地理空间数据)或利用知识图谱(KGs)来缓解序列数据的稀疏性问题。然而,这些方法在性能上主要受到两个挑战的限制:(1)如何捕捉用户基于复杂地理空间信息的动态偏好;以及(2)如何以低计算成本高效地整合图结构数据与序列数据中的时空知识。在本文中,我们提出了一种新颖的外卖推荐模型(STKDRec),通过一种低计算成本的时空知识蒸馏策略实现上述目标。具体而言,在预训练阶段,我们采用预训练的时空知识图谱(STKG)编码器提取STKG中的高阶时空知识与协同关联。在STKD阶段,我们设计了一个ST-Transformer,从序列角度全面建模用户基于多种地理空间信息的动态偏好。此外,我们提出了一种时空知识蒸馏方法,能够以较低的模型训练成本自适应融合预训练STKG编码器与ST-Transformer中的丰富时空知识。在三个真实世界数据集上的大量实验表明,我们的STKDRec显著优于最先进的基线方法。
恭喜以上老师和同学在科研中取得优秀的成果,也希望同学们能够再接再厉,继续在科研的道路上不断前行,取得更多优异的成果。