研究所动态
喜报 | 我所三篇论文被国际顶级会议IJCAI 2025录用
发布时间:2025年04月30日
近日,人工智能国际联合会议IJCAI 2025公布录用结果,由我所师生共同完成的3篇论文被大会录用。 IJCAI是CCF推荐的A类国际学术会议。本次IJCAI 2025一共有5404篇投稿,录用1042篇,录用率19.3%。此次我所被录用的论文的相关信息如下:
论文一
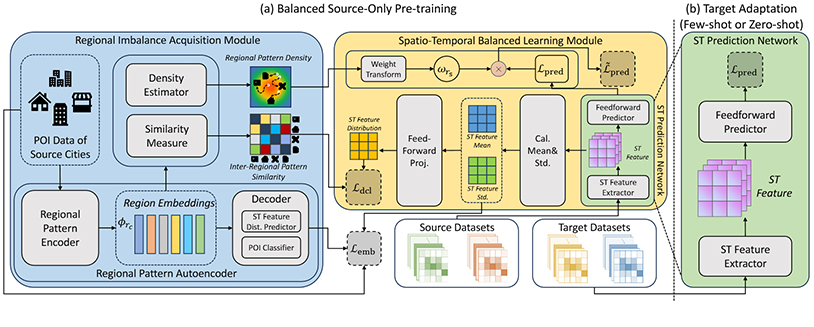
Balancing Imbalance: Data-Scarce Urban Flow Prediction via Spatio-Temporal Balanced Transfer Learning
该论文由我所博士生郝鑫岩在万怀宇老师、郭晟楠老师和林友芳老师的指导下完成。
基于深度时空网络的方法已经成为城市流量预测的主流方案,然而由于各城市发展差异及数据收集隐私等因素引起的城市可用数据稀缺现象普遍存在,阻碍了这些模型的广泛应用和部署。跨城市迁移学习技术有望成为解决这一问题的有效策略,但现有工作忽略了各城市内部固有的分布不平衡特性,潜在地降低了预训练模型的泛化能力。为此,本文提出了一种名为时空平衡迁移学习 (STBaT) 的新框架,以增强时空预测网络对于数据稀缺的新城市环境的通用性和准确性。STBaT首先通过不平衡获取技术来建模源城市的区域不平衡特性并生成指示信息,之后利用时空平衡学习技术来平衡预测学习的预训练过程,以促进可泛化的知识迁移。在多个真实的城市流量数据集上进行的广泛实验证实,本文提出的STBaT具有相比其他先进的跨城市迁移学习基线方法更优越的泛化性和准确性。
论文二
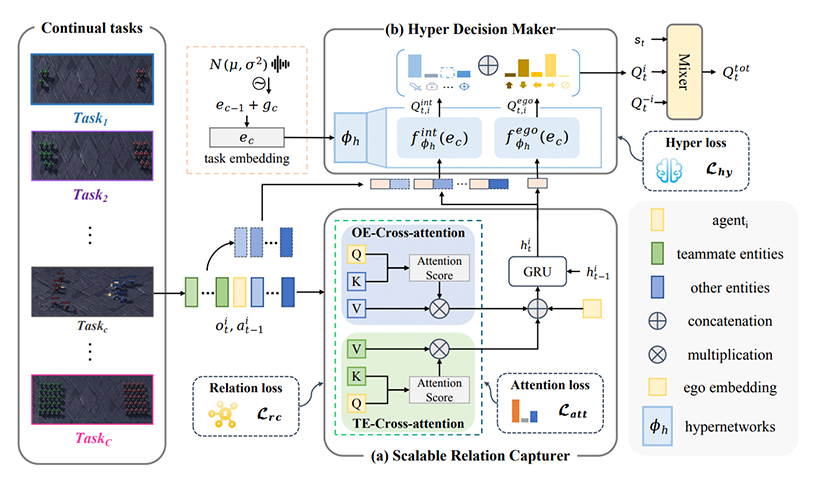
From General Relation Patterns to Task-Specific Decision-Making in Continual Multi-Agent Coordination
该论文由我所博士生姚畅、宋守诚、吴昊在林友芳老师、韩升老师和吕凯老师的指导下完成。
持续多智能体强化学习(Co-MARL)要求智能体在学习团队动态的新协作策略时解决灾难性遗忘问题。本文深入探究了Co-MARL的核心要素——关系模式(Relation Patterns),即智能体对交互关系的通用认知。除通用性外,当映射到不同动作空间时,关系模式还表现出任务特异性。为此,我们提出了一种名为"通用关系模式引导的任务特定决策器(RPG)"的新方法。在RPG框架中,智能体通过关系捕捉器从动态观察空间中提取关系模式,这些任务无关的关系模式随后通过条件超网络生成的任务特定决策器映射到不同动作空间。为克服遗忘问题,我们进一步在关系捕捉器和条件超网络上引入正则化项。在SMAC和LBF平台上的实验表明,RPG在学习新任务时能有效防止灾难性遗忘,并能实现对新任务的零样本泛化。
论文三
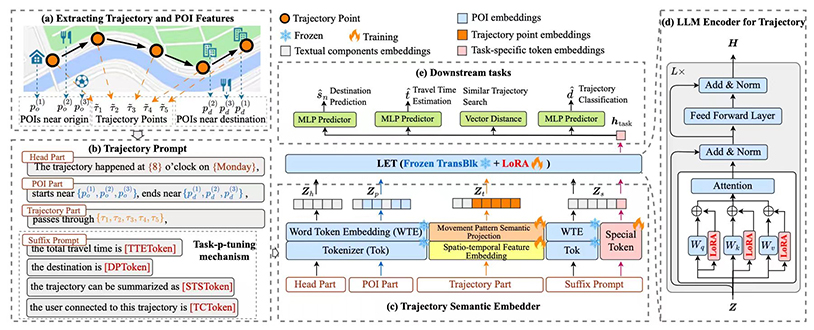
TrajCogn: Leveraging LLMs for Cognizing Movement Patterns and Travel Purposes from Trajectories
该论文由我所硕士生周泽宇、毕业博士林彦(奥尔堡大学博士后)、温浩珉(CMU博士后)在万怀宇、郭晟楠、林友芳老师以及合作者华东师范大学胡吉林老师指导下完成。
时空轨迹在数据挖掘任务中至关重要,目前的地图和基于位置的服务需要能够准确提取运动模式和旅行目的的通用轨迹学习方法。大语言模型(LLM)通过在大量数据集上进行训练展现出了非凡的通用性,并且轨迹与自然语言有一定相似性,可以用于解决该问题。为了让标准LLM可以处理时空特征,并提取特定于轨迹的信息,我们提出了 TrajCogn 模型。TrajCogn 引入了一种新颖的轨迹语义嵌入器,用于处理时空特征并提取运动模式和旅行目的,同时还采用了一种轨迹提示,将这些信息整合到LLM中,以完成各种下游任务。在三个真实世界数据集和四个具有代表性的任务上进行的实验证明了 TrajCogn 的有效性。
恭喜以上老师和同学在科研中取得优秀的成果,也希望同学们能够再接再厉,继续在科研的道路上不断前行,取得更多优异的成果。