研究所动态
我所2篇论文被人工智能顶级会议AAAI 2026录用
发布时间:2025年11月11日
近日,人工智能国际会议AAAI 2026公布录用结果,由我所师生共同完成的2篇论文被大会录用。 AAAI是CCF推荐的A类国际学术会议。本次AAAI 2026一共有23680篇投稿,录用4167篇,录用率仅为17.6%。论文的相关信息如下:
论文一
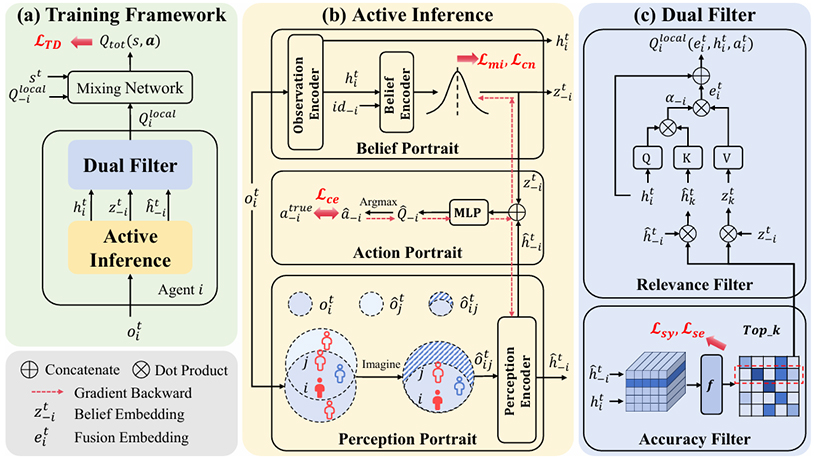
Think How Your Teammates Think: Active Inference Can Benefit Decentralized Execution
该论文由我所博士生吴昊、宋守诚、姚畅在林友芳老师、万怀宇老师、韩升老师和吕凯老师的指导下完成。
在多智能体系统中,对队友决策逻辑的显式认知是促进协作的关键。基于智能体间通信的方法可以通过信息传递来辅助认知构建过程,但会受到噪声、延迟和攻击等限制。为此,本文提出一种非通信的多智能体强化学习框架——AIM,通过建模队友的主动推理过程,实现对其决策逻辑的隐式理解。AIM 首先从感知、信念与动作三个维度建模队友的决策过程,具体包括:1)感知画像:观察环境;2)信念画像:形成信念;3)动作画像:做出决策。然后,AIM根据感知画像建模结果的准确性和相关性,有选择地将信念画像整合到决策过程中,以促进协作。在 SMAC、SMACv2、MPE 和 GRF 平台上的实验表明,AIM具有优越的性能。
论文二
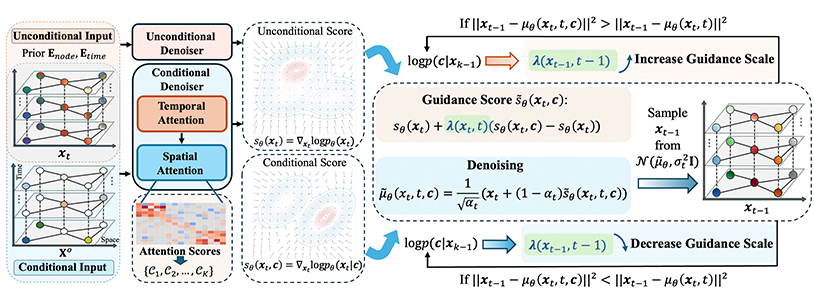
Spatial-Temporal Feedback Diffusion Guidance for Controlled Traffic Imputation
该论文由我所博士生毛潇苇、已毕业博士林彦在郭晟楠老师、万怀宇老师的指导下完成。
在智能交通系统中,对时空交通数据中的缺失值进行插补是一项重要的任务。在各种先进的方法中,基于分数的扩散模型展现出较强竞争力。这类模型通过执行一个逆向过程来生成数据,并在此过程中使用已观测到的值作为条件引导。然而,现有的扩散模型通常在所有空间和时间维度上应用统一的引导尺度,这对于缺失率高的节点是不够的。稀疏的观测数据无法提供足够的条件引导,导致生成过程偏向于模型学习到的先验分布,而不是紧密跟随条件观测,最终导致插补性能不佳。为了解决这个问题,本文提出了一种能够在插补过程中自适应调整引导尺度的方法。该方法首先引入了一种动态反馈机制,它会根据后验似然近似来调整引导尺度,当生成的数值偏离观测值时,引导尺度会随之增加,而当两者对齐改善时,引导尺度则会减少,以防止过度校正。其次,由于对所有节点使用全局统一的引导尺度是次优的,该方法还会通过注意力分数来对节点进行聚类,并在聚类级别上计算引导尺度。这种方式利用时空相关性提供了更准确的引导。在真实世界的交通数据集上进行的实验结果表明,提出方法显著提升了交通数据插补的准确性。