研究所动态
我所四篇文章被人工智能国际会议IJCAI 2026录用
发布时间:2026年5月9日
近日,第35届国际人工智能联合会议(IJCAI 2026)公布了最终录用结果,由我所师生共同完成的4篇论文被大会录用。论文的相关信息如下:
论文一
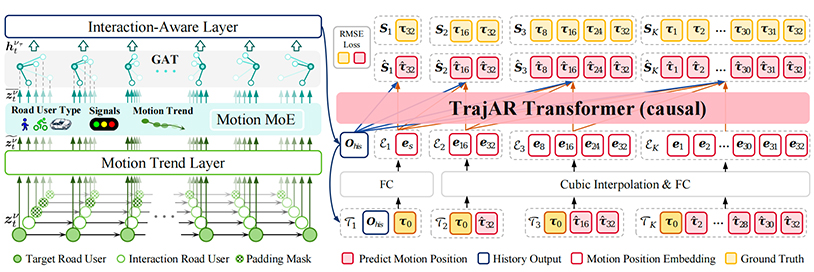
TrajAR: Long-Term Trajectory Prediction at Urban Intersections via Multi-scale Interaction Perception
该篇论文由我所博士生贡乐天在新加坡南洋理工大学联合培养期间完成,合作者包括已毕业博士生林彦,硕士生张昕跃、双毅伟、姚冠宇,指导教师为我所万怀宇、郭晟楠、林友芳以及南洋理工大学的龙程老师。
该研究聚焦于城市交叉口中多类型交通参与者(机动车、非机动车、行人)的长期轨迹预测,旨在解决复杂交互建模困难及传统自回归方法易产生误差累积两大关键问题。通过将轨迹预测的自回归方式从传统的“逐时刻预测”重构为“逐尺度预测”,通过从粗到细的多尺度解码策略,先建立长期轨迹的骨架,再利用三次样条插值逐步细化,从而有效缓解了误差累积和整体偏差问题;同时,其编码器引入了运动混合专家(MoE)模块和图注意力网络(GAT),能够联合建模道路用户的运动趋势、类型、信号状态及隐式交互,提升了在复杂城市交叉口多类交通参与者场景下的预测精度与鲁棒性。
论文二
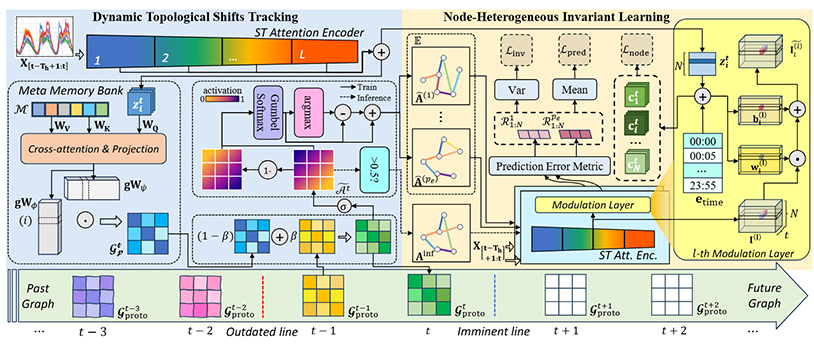
Tracking Topological Shifts: How Can Dynamic Graph Invariant Learning Enable Reliable Out-of-Time Spatio-Temporal Prediction?
论文由我所博士生郝鑫岩在万怀宇老师、郭晟楠老师、林友芳老师以及中国科学院工业人工智能研究所的王少将老师指导下完成。
基于图网络的时空预测在智能城市管理中至关重要,但现有方法多依赖静态图结构,难以应对由时间推移引发的拓扑持续变化,从而限制了模型在长期部署中的鲁棒性。本文正式提出“时外(out-of-time, OOT)泛化”问题,区别于传统分布外(OOD)场景,聚焦于交通系统中由时间驱动的拓扑演化所带来的分布偏移。为此,本文提出了动态时空图不变学习模型DynaSTar,通过构建动态概率图结构并采用动量更新机制捕捉图拓扑的渐进演变,同时引入稀疏采样策略以增强鲁棒性。进一步,针对节点异质性,模型构建节点邻域环境集合,并结合条件调制与全局预测器,提取节点级不变表征。通过多目标优化联合训练,DynaSTar实现了对拓扑动态的自适应与对未来时段的准确预测。在两个大规模长期真实交通数据集上的实验结果表明,DynaSTar在多种动态拓扑场景下均取得了优越的时外泛化性能。
论文三
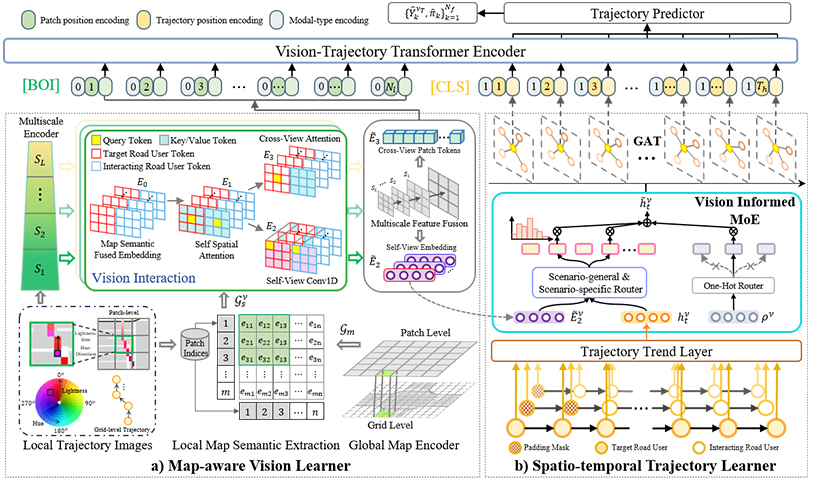
G-VTM: A Multimodal Vision-Trajectory Model for Generalized Vehicle Trajectory Prediction
论文由我所学生张昕跃、毕业博士生林彦、贡乐天、程晋俊、张钧霖和姚冠宇在郭晟楠老师,林友芳老师,万怀宇老师的指导下完成。
跨多样交通路口(包括城市交叉口和环岛)的通用车辆轨迹预测是车路协同系统(CVIS)中的一项关键任务。本文面临两个关键挑战:(1)异构路口间的泛化问题。不同路口具有不同的地图语义和交通行为模式。其中,前者来源于道路拓扑结构和交通规则的差异,后者则反映了道路参与者多样化的行为意图。(2)场景自适应交互行为建模问题。单一模态的轨迹学习虽然能够捕获局部时空相关性,但缺乏地图约束以及方向感知的交互上下文。 为了解决上述问题,我们提出了一种通用视觉-轨迹模型 G-VTM。G-VTM 从轨迹模态中建模细粒度的行为模式以及相对空间交互。同时,在视觉模态下,G-VTM 能够捕获全局地图语义,并基于直观的视觉感知对场景与方向感知交互进行建模。在多个由无人机(UAV)采集的真实世界数据集上的实验表明,我们的方法在异构交通条件下实现了较强的泛化性能。
论文四
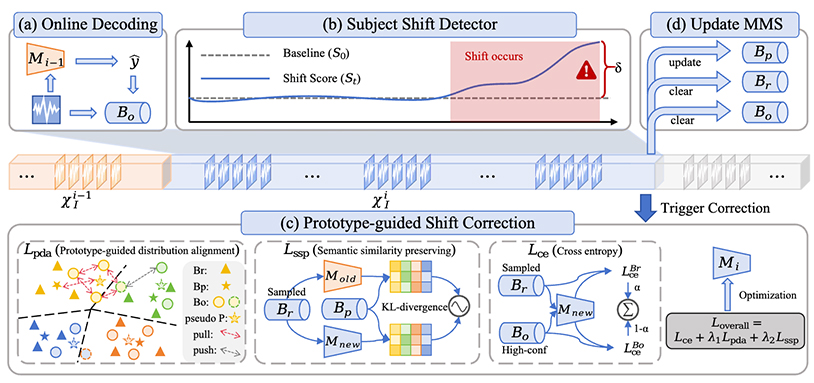
When and How to Adapt: Subject Shifts Detection and Prototype-Guided Correction for Online EEG Decoding
论文由我所硕士生张绍琪、博士生靳希源、宁晓军、本科生陈怡霖和王晶老师共同合作完成。
在线脑电图解码对真实世界的脑机接口(BCI)至关重要,但面临着连续分布偏移(包括受试者之间和受试者内部的变化)带来的巨大挑战。现有的无监督连续域自适应(UCDA)方法通常依赖于严格的硬边界,如受试者切换标签或固定的批量大小来触发自适应。同时,一些在线脑电图解码方法利用检测到的偏移作为软边界,但这些方法不适合无监督场景,而且缺乏有效的分布对齐策略。为了解决这些问题,我们提出了一种新颖的原型驱动在线脑电图解码框架(PRED)。PRED 融合了基于策略稳定性的主体偏移检测器 (SSD),可在无监督的情况下可靠地识别潜域偏移,从而构建自适应软边界。此外,我们还设计了一种原型引导偏移校正(PSC)机制,该机制利用多粒度记忆结构引导分布对齐,同时保持语义稳定性。在三个公共数据集上进行的实验证实,PRED 实现了卓越的可塑性和稳定性,并显示出显著的未来性,即能够向前迁移到受试者的未来样本。