研究所动态
我所所长林友芳教授指导研究生发表Rank1国际会议论文
发布时间:2016年12月1日
2016年9月,在研究所所长林友芳教授精心指导下,论文“An Efficient Approach of Map-learning on Service Robot in Complex Office Environment using Laser Radar”被Rank1类国际会议ICARCV2016收录。该论文主要研究了在复杂办公环境下,基于机器人雷达,自主环境建模问题。16级研究生白相鹏代表林友芳教授赴泰国参加大会,并宣读了论文。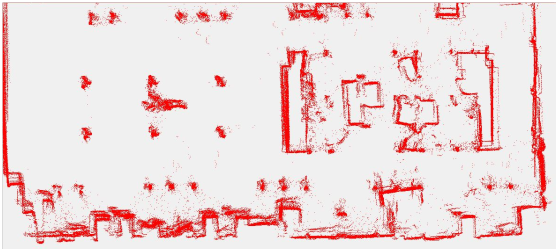
Fig. 1 original data without processing by DIF
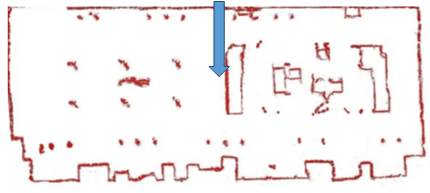
Fig.2 original data without processing by DIF
